
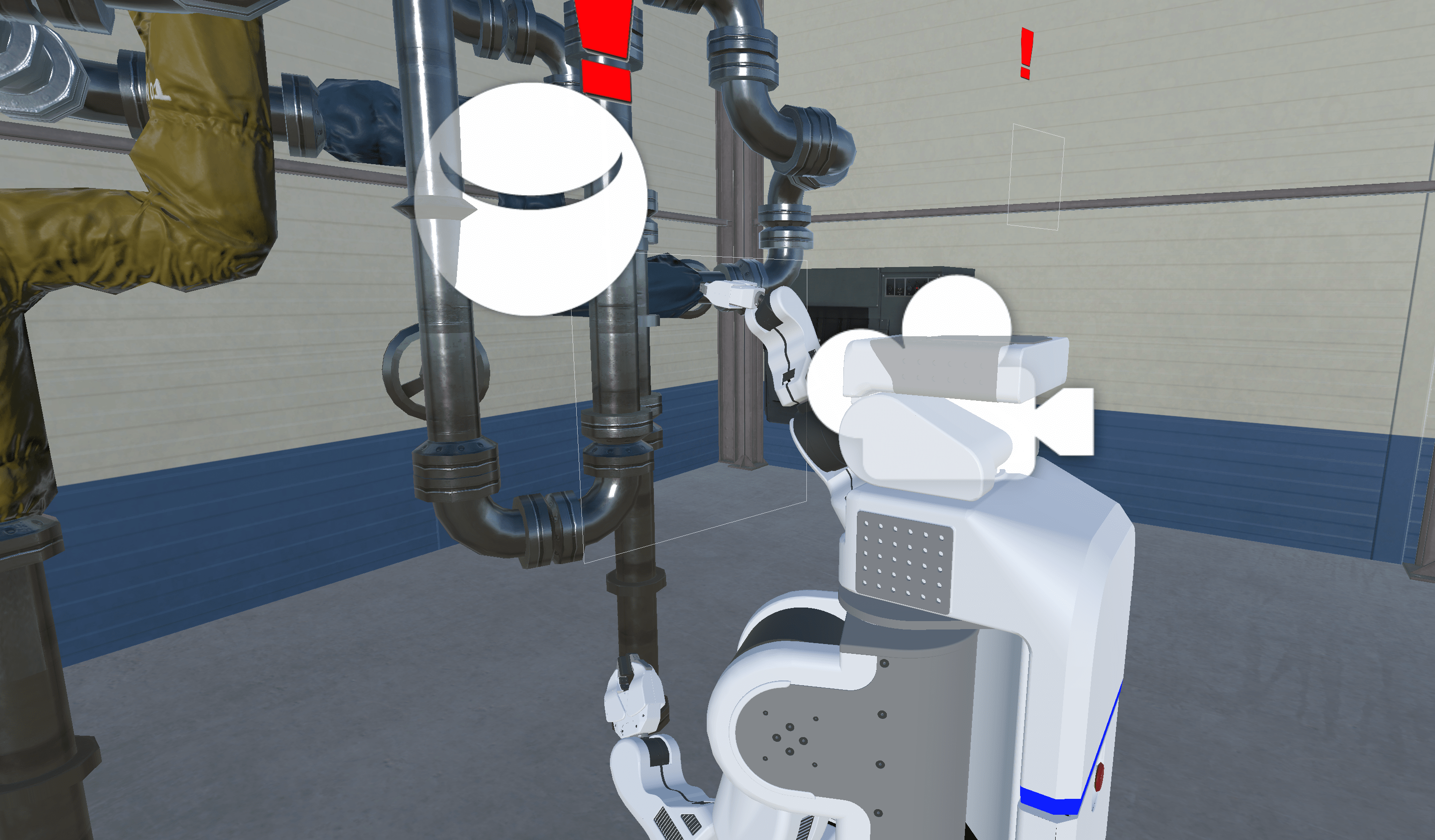
In this study, we examined the effects of physical appearance (more humanoid vs. less humanoid) and communication modality (Voice, Speech Bubble, and Objective Dashboard) on trust and perceived anthropomorphism.
Our experimental results have implications for designing various features of a robot. First, we found that there is an interaction effect between task types and how robot appearance influences the level of trust. People trusted the more humanoid robot more in case of Clean (Safe), Physically Easy, and Social tasks in the virtual warehouse environment.
Second, we discovered that different types of anthropomorphic design features affect different factors of perceived anthropomorphism. A robot with more humanoid physical attributes is likely to be perceived as more sociable and animate, while it has no effect on how people perceive the robot's agency and disturbance. On the other hand, a robot with a more anthropomorphic communication modality (Voice) was seen as having more agency than a robot with a less anthropomorphic communication modality (Objective Dashboard).
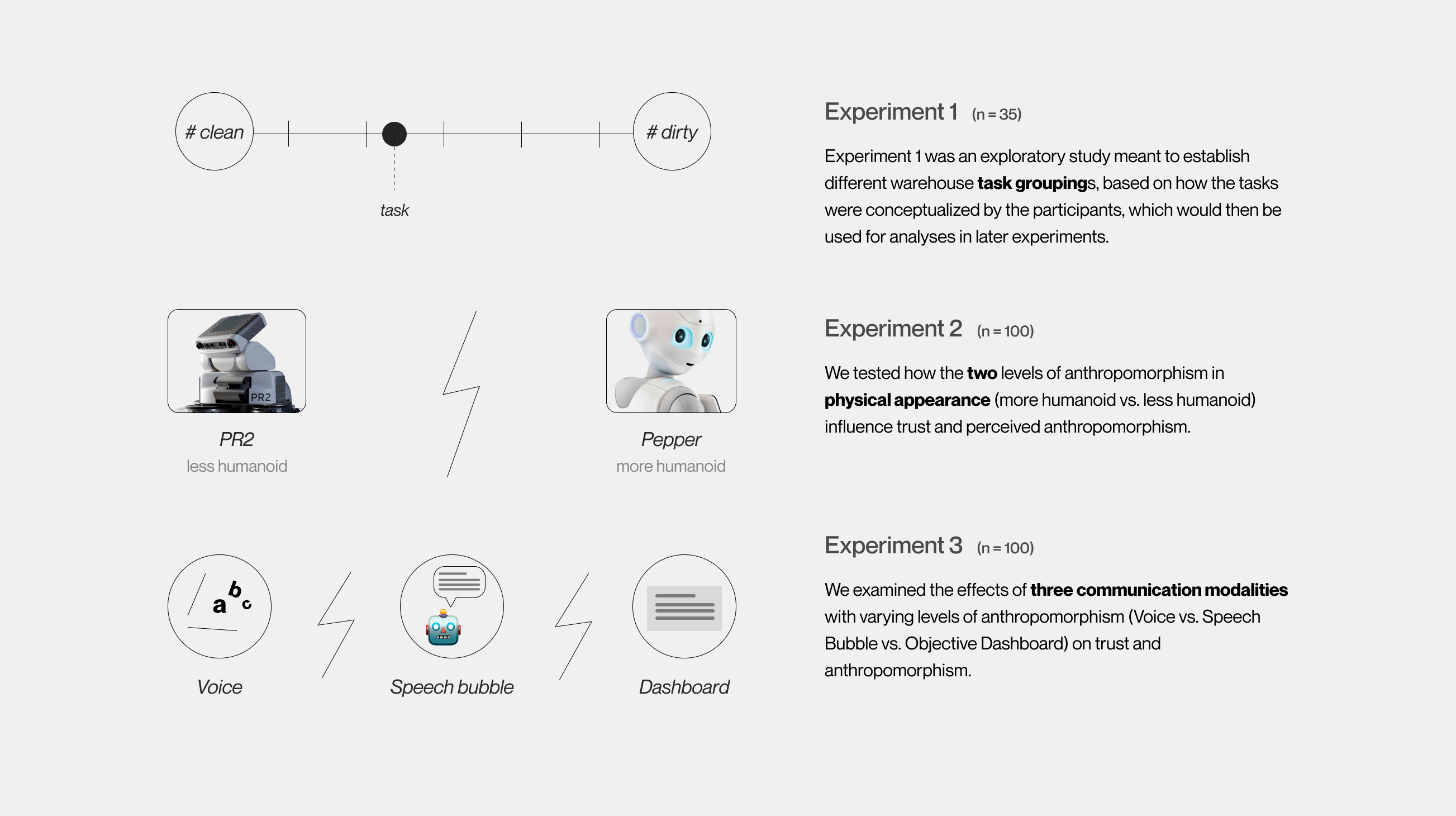
By performing median split on the data we gathered from Experiment 1, we assigned 6 descriptors to each of the ten warehouse tasks.

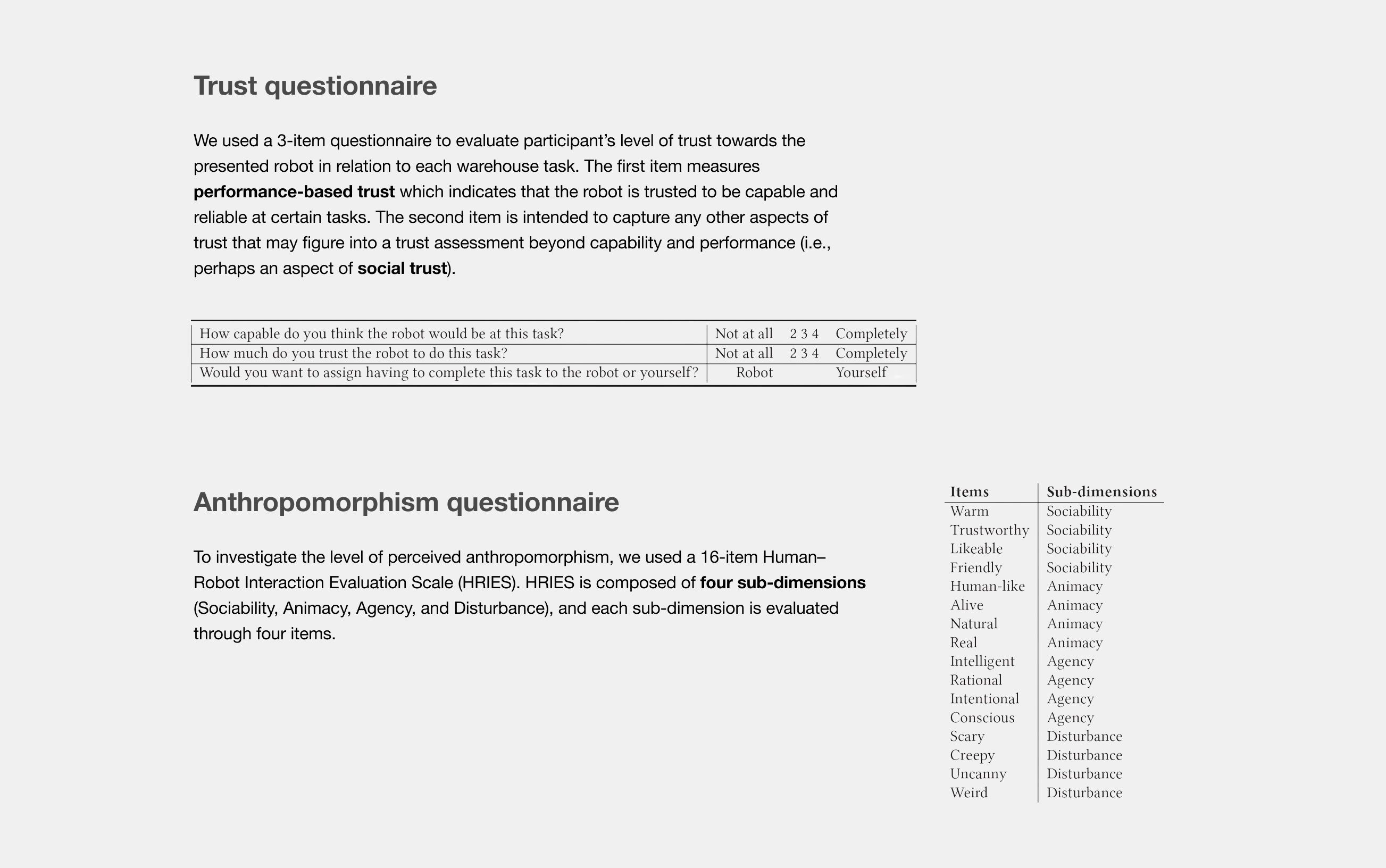
Trust in robot was higher when 1) participants viewed a more humanoid robot, and 2) the type of task was Clean (Safe), Physically Easy, or Social. Also, participants who viewed a more humanoid robot reported higher levels of overall perceived anthropomorphism, Sociability, and Animacy. No significant relationship was found between communication modality and trust in robot, but participants who viewed the robot with voice perceived the robot as having more agency compared to participants who viewed the robot with an objective dashboard.
My thesis paper lays out the specifics of my research process, theoretical background, and statistical analyses. If you're interested in checking it out, click here.